பொட்டென்டோமீட்டர்கள் மற்றும் ரோட்டரி குறியாக்கிகள் இரண்டும் சுழற்சி அல்லது உணர்வு நிலையை கண்டறிய பயன்படுத்தப்படுகின்றன. அவை எலக்ட்ரோ மெக்கானிக்கல் சாதனங்கள், எலக்ட்ரானிக்ஸ் துறையில் பல்வேறு பயன்பாடுகளைக் கொண்டுள்ளன. வெவ்வேறு திட்டங்களை உருவாக்குவதற்கு அவை Arduino உடன் இணைக்கப்படலாம். இந்த கட்டுரை பொட்டென்டோமீட்டருக்கும் ரோட்டரி குறியாக்கிக்கும் இடையிலான அடிப்படை வேறுபாடுகளை விளக்குவதாகும்.
பொட்டென்டோமீட்டர் என்றால் என்ன
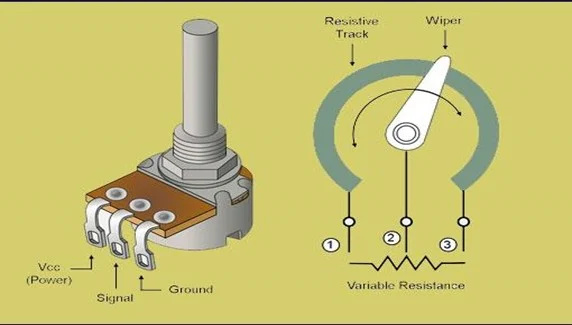
பொட்டென்டோமீட்டர் என்பது ஒரு ரியோஸ்டாட் அல்லது நாம் அதை மாறி மின்தடையம் என்று அழைக்கலாம். பொட்டென்டோமீட்டரின் தண்டு சுழற்சியைப் பொறுத்து எதிர்ப்பின் மதிப்பு மாறுபடும். பொட்டென்டோமீட்டர்கள் ஒரு குறிப்பிட்ட தூரத்திற்கு மட்டுமே திரும்ப முடியும். அனலாக் மற்றும் டிஜிட்டல் பொட்டென்டோமீட்டர்கள் இரண்டும் உள்ளன, ஆனால் அவை கிட்டத்தட்ட ஒரே மாதிரியானவை. Arduino, Raspberry Pi மற்றும் பிற சாதனங்களில் உள்ள மைக்ரோகண்ட்ரோலர்களுடன் அனலாக் பொட்டென்டோமீட்டர்களை இணைக்க முடியும். ஒரு பொட்டென்டோமீட்டரில் உள்ளீட்டு மின்னழுத்த முள் Vcc, Ground Pin GND மற்றும் உள்ளீட்டு சமிக்ஞை முள் ஆகிய மூன்று ஊசிகள் உள்ளன. சிக்னல் முள் Arduino க்கு உள்ளீட்டை வழங்குகிறது.
ரோட்டரி என்கோடர் என்றால் என்ன
ரோட்டரி குறியாக்கிகள் ரோட்டரி குமிழியின் கோண நிலையை உணர்ந்து மைக்ரோகண்ட்ரோலர் அல்லது அவை இணைக்கப்பட்டுள்ள வேறு எந்த சாதனத்திற்கும் ஒரு சமிக்ஞையை அனுப்புகின்றன. இது பொதுவான பின்னுடன் இணைக்கப்பட்ட சமமான இடைவெளி கொண்ட தொடர்பு பகுதிகளுடன் ஒரு வட்டு உள்ளது. ரோட்டரி குறியாக்கிகள் உள்ளமைக்கப்பட்ட புஷ் பட்டன் அல்லது ரோட்டரி சுவிட்சைக் கொண்டுள்ளன, அவை குறிப்பிட்ட தேவைகளுக்கு ஏற்ப ஆன் மற்றும் ஆஃப் சிக்னல்களை வழங்கும்.

ரோட்டரி என்கோடரின் பின்அவுட் வரைபடம் மற்றும் பின் விளக்கம்
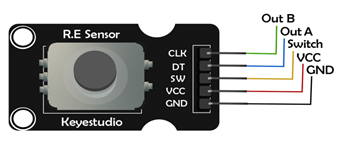
கீழே கொடுக்கப்பட்டுள்ள வரைபடம் ரோட்டரி குறியாக்கியின் ஊசிகளைக் காட்டுகிறது. இந்த ஊசிகள் பின்வருமாறு விவரிக்கப்பட்டுள்ளன:
அவுட் பி அல்லது சிஎல்கே
இந்த முள் குமிழ் அல்லது ரோட்டரி குறியாக்கி எத்தனை முறை சுழன்றது என்பதை வெளியிடும். ஒவ்வொரு முறையும் குமிழ் சுழலும் போது, CLK ஆனது உயர் மற்றும் குறைந்த சுழற்சியை நிறைவு செய்கிறது. இது ஒரு சுழற்சியாக கணக்கிடப்படுகிறது.
அவுட் ஏ அல்லது டிடி
இது சுழற்சியின் திசையை நிர்ணயிக்கும் ரோட்டரி குறியாக்கியின் இரண்டாவது வெளியீட்டு முள் ஆகும். இது CLK சிக்னலை விட 90° பின்தங்கியுள்ளது. எனவே, அதன் நிலை CLK இன் நிலைக்கு சமமாக இல்லாவிட்டால், சுழற்சியின் திசையானது கடிகார திசையில் இருக்கும், இல்லையெனில், எதிர்-கடிகார திசையில் இருக்கும்.
சொடுக்கி
புஷ் பட்டன் அழுத்தப்பட்டதா இல்லையா என்பதைச் சரிபார்க்க சுவிட்ச் பின் பயன்படுத்தப்படுகிறது.
விசிசி
இந்த முள் 5V விநியோகத்துடன் இணைக்கப்பட்டுள்ளது
GND
இந்த முள் தரையுடன் இணைக்கப்பட்டுள்ளது
பொட்டென்டோமீட்டருக்கும் ரோட்டரி என்கோடருக்கும் இடையே உள்ள வேறுபாடு
| விவரக்குறிப்பு | பொட்டென்டோமீட்டர் | ரோட்டரி குறியாக்கி |
| சுழற்சி | பொட்டென்டோமீட்டரை ஒரு திசையில் மட்டுமே சுழற்ற முடியும், அதுவும் ஒரு வட்டத்தின் நான்கில் மூன்று பங்குக்கு. | ரோட்டரி என்கோடர் 360° தொடர்ந்து கடிகார மற்றும் எதிரெதிர் திசைகளில் சுழலும் திறன் கொண்டது. |
| அனலாக் அல்லது டிஜிட்டல் சாதனம் | பொட்டென்டோமீட்டர் என்பது பெரும்பாலும் ஒரு அனலாக் உள்ளீட்டு சாதனமாகும், இது மின்தடையின் மதிப்பில் ஏற்படும் மாற்றத்தின் மூலம் நிலை மாற்றத்தை அளவிடுகிறது. | ரோட்டரி குறியாக்கி என்பது கோண நிலையை உணர்ந்து டிஜிட்டல் மதிப்புகளை வழங்கும் டிஜிட்டல் உள்ளீட்டு சாதனமாகும்.
|
| உள்ளீட்டு நிலைகளின் எண்ணிக்கை | ஒரு பொட்டென்டோமீட்டரில் எண்ணற்ற உள்ளீட்டு நிலைகள் உள்ளன, அவை ஒரு அனலாக் சாதனம் என்பதால் மதிப்புகளை எடுக்கலாம். | ரோட்டரி குறியாக்கிகள் வரையறுக்கப்பட்ட எண்ணிக்கையிலான உள்ளீட்டு நிலைகளைக் கொண்டுள்ளன. |
Arduino உடன் பொட்டென்டோமீட்டரை அமைத்தல்
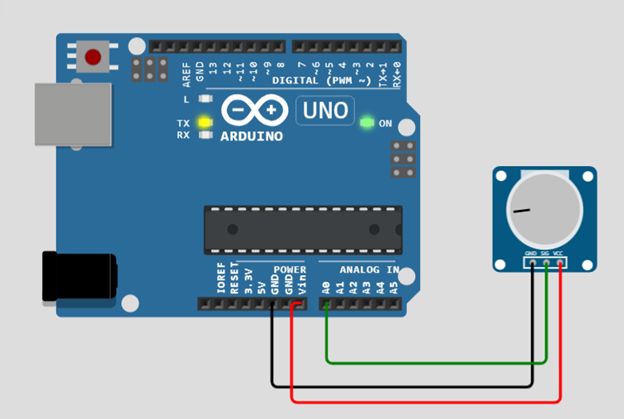
ரோட்டரி குறியாக்கியை விட பொட்டென்டோமீட்டரை ஆர்டுயினோவுடன் அமைப்பது எளிது. பொட்டென்டோமீட்டரில் விசிசி, ஜிஎன்டி மற்றும் ஆர்டுயினோவுடன் இணைக்கப்பட்ட இன்புட் முள் ஆகிய மூன்று ஊசிகள் மட்டுமே உள்ளன. Arduino உடன் பொட்டென்டோமீட்டரின் இடைமுகம் கீழே காட்டப்பட்டுள்ளது:
ஆர்டுயினோவில் பொட்டென்டோமீட்டரை நிரலாக்குவது ரோட்டரி குறியாக்கியை விட எளிதானது. அவை இரண்டின் மாதிரி தொடரியல் குறியீடுகள் கீழே கொடுக்கப்பட்டுள்ளன.
பொட்டென்டோமீட்டருக்கான மாதிரி குறியீடு
const int pot = A0; // உள்ளீட்டு பின்னை அறிவிக்கவும்வெற்றிட அமைப்பு ( ) {
பின் பயன்முறை ( பானை, உள்ளீடு ) ; // பொட்டென்டோமீட்டரிலிருந்து எடுக்கப்பட்ட அமைவு மதிப்பு என உள்ளீடு
தொடர்.தொடங்கு ( 9600 ) ;
}
வெற்றிட வளையம் ( ) {
int potValue = அனலாக் ரீட் ( பானை ) ; // பொட்டென்டோமீட்டரால் எடுக்கப்பட்ட உள்ளீட்டின் மதிப்பைப் படிக்கவும்
வரைபடம் ( மதிப்பு, 0 , 1023 , 0 , 255 ) ; // பொருந்தக்கூடிய உள்ளீட்டின் மதிப்பை அளவிடுதல் 8 - பிட்
Serial.println ( potValue ) ; // பொட்டென்டோமீட்டருக்கு உள்ளீடு செய்யப்பட்ட மதிப்பை அச்சிடுகிறது
தாமதம் ( 100 ) ;
}
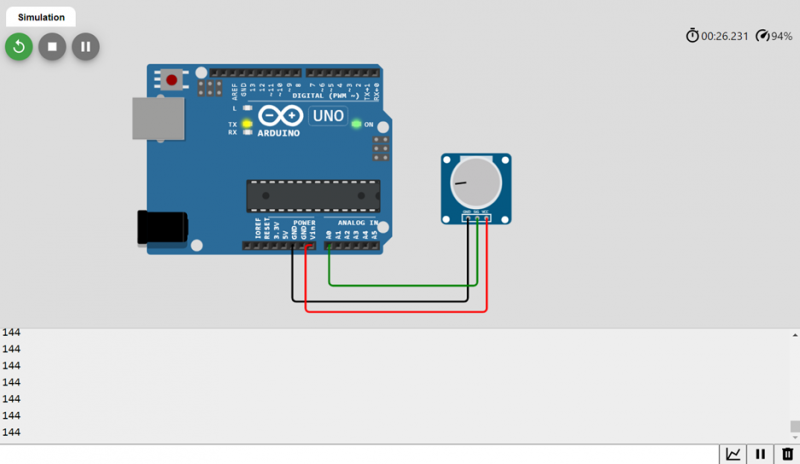
பொட்டென்டோமீட்டர் குறியீடு மிகவும் எளிதானது மற்றும் எளிமையானது. Arduino இன் அனலாக் உள்ளீட்டு முள் பொட்டென்டோமீட்டரிலிருந்து உள்ளீட்டை எடுக்க எளிமையாக அறிவிக்கப்படுகிறது, பின்னர் அனலாக் ரீட்() மற்றும் வரைபடம்() செயல்பாடுகள் பொட்டென்டோமீட்டரில் இருந்து வாசிப்பின் சரியான மதிப்பைப் படிக்கவும் கொடுக்கவும் பயன்படுத்தப்படுகின்றன.
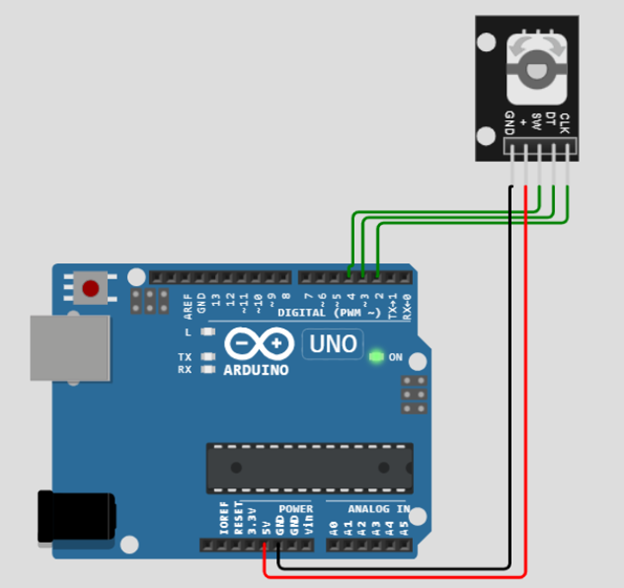
ஆர்டுயினோவுடன் ரோட்டரி என்கோடரை இடைமுகப்படுத்துதல்
ரோட்டரி குறியாக்கியில் ஐந்து ஊசிகள் உள்ளன. ரோட்டரி குறியாக்கியின் VCC மற்றும் GND ஆகியவை Arduino உடன் இணைக்கப்பட்டுள்ளன. மீதமுள்ள CLK, DT மற்றும் SW ஆகியவை Arduino இன் டிஜிட்டல் உள்ளீட்டு ஊசிகளுடன் இணைக்கப்பட்டுள்ளன.
ரோட்டரி குறியாக்கிக்கான Arduino குறியீடு
// ரோட்டரி என்கோடர் உள்ளீடுகள்#CLK_PIN 2ஐ வரையறுக்கவும்
#DT_PIN 3ஐ வரையறுக்கவும்
#SW_PIN 4 ஐ வரையறுக்கவும்
int கவுண்டர் = 0 ;
முழு எண்ணாக தற்போதையCLKState;
int lastCLKState;
சரம் தற்போதைய திசை = '' ;
கையொப்பமிடப்படாத நீண்ட கடைசிButtonPressTime = 0 ;
வெற்றிட அமைப்பு ( ) {
// குறியாக்கி ஊசிகளை அமைக்கவும் என உள்ளீடுகள்
பின் பயன்முறை ( CLK_PIN, INPUT ) ;
பின் பயன்முறை ( DT_PIN, INPUT ) ;
பின் பயன்முறை ( SW_PIN, INPUT_PULLUP ) ;
// சீரியல் மானிட்டரை அமைக்கவும்
தொடர்.தொடங்கு ( 9600 ) ;
// CLK இன் ஆரம்ப நிலையைப் படியுங்கள்
lastCLKState = டிஜிட்டல் ரீட் ( CLK_PIN ) ;
}
வெற்றிட வளையம் ( ) {
// CLK இன் தற்போதைய நிலையைப் படியுங்கள்
தற்போதையCLKState = டிஜிட்டல் ரீட் ( CLK_PIN ) ;
// என்றால் கடந்த மற்றும் CLK இன் தற்போதைய நிலை வேறுபட்டது, பிறகு ஒரு துடிப்பு ஏற்பட்டது
// மட்டுமே எதிர்வினையாற்றவும் 1 இரட்டை எண்ணிக்கையைத் தவிர்க்க மாநில மாற்றம்
என்றால் ( தற்போதையCLK மாநிலம் ! = lastCLKState && தற்போதையCLKState == 1 ) {
// CLK நிலையை விட DT நிலை வேறுபட்டால், பிறகு
// குறியாக்கி எதிர்-கடிகார திசையில் சுழல்கிறது, எனவே குறையும்
என்றால் ( டிஜிட்டல் வாசிப்பு ( DT_PIN ) ! = தற்போதையCLK மாநிலம் ) {
எதிர்--;
தற்போதைய திசை = 'CCW' ;
} வேறு {
// குறியாக்கி கடிகார திசையில் சுழல்கிறது, எனவே அதிகரிக்கும்
கவுண்டர்++;
தற்போதைய திசை = 'CW' ;
}
தொடர்.அச்சு ( 'சுழற்சி திசை:' ) ;
தொடர்.அச்சு ( தற்போதைய திசை ) ;
தொடர்.அச்சு ( ' | எதிர் மதிப்பு: ' ) ;
Serial.println ( கவுண்டர் ) ;
}
// நினைவில் கொள்ளுங்கள் கடந்த CLK மாநிலம்
lastCLKState = தற்போதையCLKState;
// பொத்தான் நிலையைப் படிக்கவும்
int buttonState = டிஜிட்டல் ரீட் ( SW_PIN ) ;
// குறைந்த சமிக்ஞையைக் கண்டறிந்தால், பொத்தான் அழுத்தப்படும்
என்றால் ( பட்டன்ஸ்டேட் == குறைந்த ) {
// 50ms கடந்துவிட்டால் கடந்த குறைந்த துடிப்பு, அதாவது
// பொத்தான் அழுத்தப்பட்டு, விடுவிக்கப்பட்டு, மீண்டும் அழுத்தப்பட்டது
என்றால் ( மில்லி ( ) - lastButtonPressTime > ஐம்பது ) {
Serial.println ( 'பொத்தானை அழுத்தியது!' ) ;
}
// நினைவில் கொள்ளுங்கள் கடந்த பொத்தானை அழுத்தவும் நிகழ்வு நேரம்
lastButtonPressTime = மில்லிஸ் ( ) ;
}
// போடு உள்ளே ஒரு சிறிய தாமதம் உதவி வாசிப்பைத் தடுக்கவும்
தாமதம் ( 1 ) ;
}
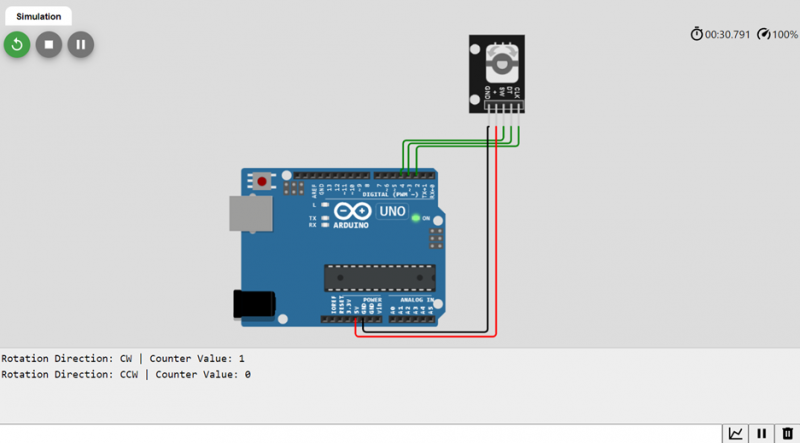
மேலே கொடுக்கப்பட்ட குறியீட்டில், CLK பின்னின் நிலை loop() செயல்பாட்டில் சரிபார்க்கப்படுகிறது. அதன் முந்தைய நிலைக்கு சமமாக இல்லாவிட்டால், சுழலும் குமிழ் சுழன்றிருப்பதைக் காட்டுகிறது. இப்போது, குமிழ் சுழற்சியின் திசையைச் சரிபார்க்க, CLK இன் தற்போதைய நிலை DT நிலையுடன் ஒப்பிடப்படுகிறது. இரண்டு நிலைகளும் சமமற்றதாக இருந்தால், குமிழ் கடிகார திசையில் சுழன்றிருப்பதைக் காட்டுகிறது மற்றும் ரோட்டரி குமிழியின் நிலையைக் காட்ட அதன் மதிப்பை எதிர் அதிகரிக்கிறது. எதிர் வழக்கில், எதிர் குறைப்பு.
விண்ணப்பங்கள்
ஒரு கட்டுப்பாட்டு செயல்பாடு தேவைப்படும் இடங்களில் பொட்டென்டோமீட்டர்கள் முக்கியமாகப் பயன்படுத்தப்படுகின்றன. அவை தொகுதி கட்டுப்பாடு, LED பிரகாசம் கட்டுப்பாடு ஆகியவற்றில் பயன்படுத்தப்படுகின்றன. மறுபுறம், ரோட்டரி குறியாக்கிகள் பரந்த அளவிலான பயன்பாடுகளை வழங்குகின்றன. அவை ரோபாட்டிக்ஸ், மருத்துவ உபகரணங்கள், ஆட்டோமேஷன் மற்றும் கேமிங்கில் பயன்படுத்தப்படுகின்றன.
முடிவுரை
பொட்டென்டோமீட்டர்கள் மற்றும் ரோட்டரி குறியாக்கிகள் இரண்டும் எலக்ட்ரானிக்ஸ் துறையில் குறிப்பாக பயனுள்ள சாதனங்கள். பொட்டென்டோமீட்டர்களுடன் ஒப்பிடும்போது ரோட்டரி குறியாக்கிகள் மேம்பட்டவை, ஏனெனில் அவை 360° வரை தொடர்ந்து சுழலும். இதேபோல், அவை நவீன மின்னணுவியலில் அதிக பயன்பாடுகளைக் கொண்டுள்ளன, மேலும் அவை பொட்டென்டோமீட்டர்களை விட சற்று கடினமாக பயன்படுத்தப்படுகின்றன .