ESP32 என்பது IoT அடிப்படையிலான மைக்ரோகண்ட்ரோலர் போர்டு ஆகும், இது வெவ்வேறு சென்சார்களை இடைமுகப்படுத்தவும், கட்டுப்படுத்தவும் மற்றும் படிக்கவும் பயன்படுகிறது. PIR அல்லது மோஷன் சென்சார் என்பது ESP32 ஐப் பயன்படுத்தி மோஷன் சென்சார் வரம்பில் உள்ள ஒரு பொருளின் இயக்கத்தைக் கண்டறிய ESP32 உடன் இடைமுகப்படுத்தக்கூடிய சாதனங்களில் ஒன்றாகும்.
PIR சென்சாருடன் ESP32 ஐ இடைமுகப்படுத்தத் தொடங்கும் முன், குறுக்கீடுகள் எவ்வாறு செயல்படுகின்றன மற்றும் ESP32 இல் அவற்றை எவ்வாறு படித்து கையாள்வது என்பதை நாம் அறிந்திருக்க வேண்டும். அடுத்து ESP32 நிரலாக்கத்தில் தாமதம்() மற்றும் millis() செயல்பாட்டின் முக்கிய கருத்தை நாம் புரிந்து கொள்ள வேண்டும்.
ESP32 உடன் PIR இன் செயல்பாட்டை விரிவாக விவாதிப்போம்.
இந்தக் கட்டுரைக்கான உள்ளடக்கம் இதோ:
1: குறுக்கீடுகள் என்றால் என்ன
ESP32 நிரலாக்கத்தில் நிகழும் பெரும்பாலான நிகழ்வுகள் வரிசையாக இயங்குகின்றன, அதாவது கோட் பை லைன் செயல்படுத்தல். குறியீட்டை வரிசையாக செயல்படுத்தும் போது இயக்கத் தேவையில்லாத நிகழ்வுகளைக் கையாளவும் கட்டுப்படுத்தவும் குறுக்கிடுகிறது பயன்படுத்தப்படுகின்றன.
எடுத்துக்காட்டாக, ஏதேனும் ஒரு விசேஷ நிகழ்வு நிகழும்போது ஒரு குறிப்பிட்ட பணியைச் செய்ய விரும்பினால் அல்லது நாம் குறுக்கீடு பயன்படுத்தும் மைக்ரோகண்ட்ரோலரின் டிஜிட்டல் பின்களுக்கு ஒரு தூண்டுதல் சமிக்ஞை கொடுக்கப்பட்டால்.
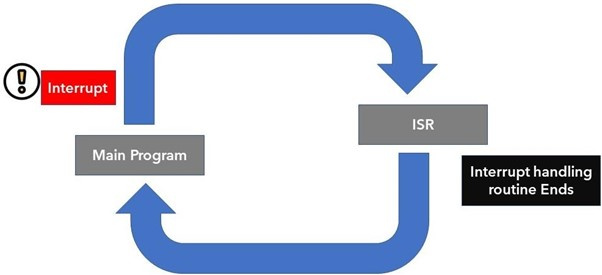
குறுக்கீடு ஏற்பட்டால், ESP32 இன்புட் பின்னின் டிஜிட்டல் நிலையை நாம் தொடர்ந்து சரிபார்க்க வேண்டியதில்லை. ஒரு குறுக்கீடு ஏற்பட்டால், செயலி முக்கிய நிரலை நிறுத்துகிறது மற்றும் ஒரு புதிய செயல்பாடு அழைக்கப்படுகிறது, இது ISR ( சேவை வழக்கத்தை குறுக்கிடவும் ) இது ஐ.எஸ்.ஆர் செயல்பாடு மீண்டும் முக்கிய நிரலுக்குத் திரும்பிய பிறகு ஏற்படும் குறுக்கீட்டைக் கையாளுகிறது மற்றும் அதை இயக்கத் தொடங்குகிறது. ISR இன் உதாரணங்களில் ஒன்று PIR மோஷன் சென்சார் எந்த இயக்கம் கண்டறியப்பட்டவுடன் ஒரு தடங்கலை உருவாக்குகிறது .
1.1: ESP32 இல் பின்களை குறுக்கிடுகிறது
டச் சென்சார் அல்லது புஷ் பட்டன் போன்ற எந்த வன்பொருள் தொகுதியாலும் வெளிப்புற அல்லது வன்பொருள் குறுக்கீடு ஏற்படலாம். ESP32 பின்களில் தொடுதல் கண்டறியப்படும்போது தொடு குறுக்கீடுகள் ஏற்படும் அல்லது ஒரு விசை அல்லது புஷ் பட்டனை அழுத்தும்போது GPIO குறுக்கீடும் பயன்படுத்தப்படலாம்.
இந்த கட்டுரையில், ESP32 உடன் PIR சென்சார் மூலம் இயக்கம் கண்டறியப்படும்போது குறுக்கீட்டைத் தூண்டுவோம்.
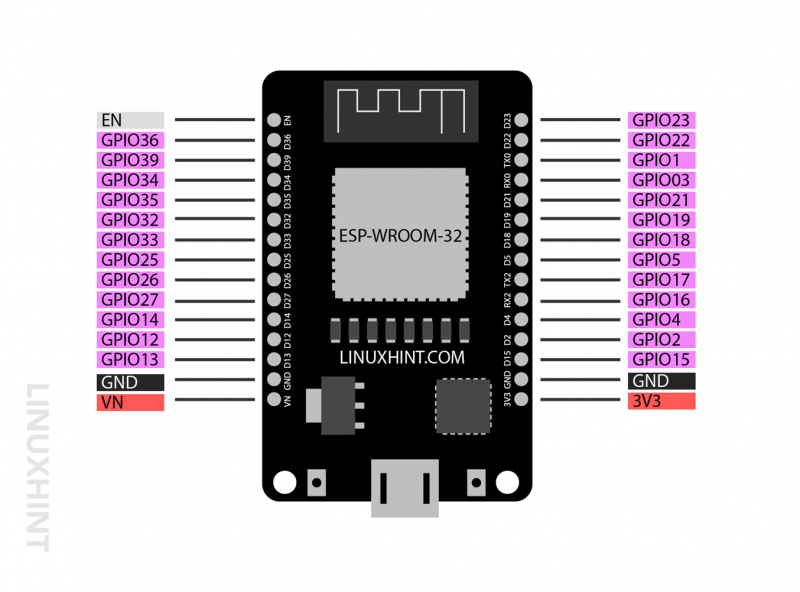
பொதுவாக வரும் 6 SPI ஒருங்கிணைந்த பின்களைத் தவிர கிட்டத்தட்ட அனைத்து GPIO பின்களும் 36 ESP32 போர்டின் பின் பதிப்பை குறுக்கீடு அழைப்பின் நோக்கத்திற்காகப் பயன்படுத்த முடியாது. எனவே, வெளிப்புற குறுக்கீட்டைப் பெற, பின்வருபவை ஊதா நிறத்தில் முன்னிலைப்படுத்தப்பட்ட பின்களை ESP32 இல் ஒருவர் பயன்படுத்தலாம்:
இந்த படம் 30 பின் ESP32 ஆகும்.
1.2: ESP32 இல் ஒரு குறுக்கீடு அழைப்பு
ESP32 இல் குறுக்கீடு பயன்படுத்துவதற்கு நாம் அழைக்கலாம் இணைப்பு இடையூறு() செயல்பாடு.
இந்த செயல்பாடு பின்வரும் மூன்று வாதங்களை ஏற்றுக்கொள்கிறது:
-
- GPIO முள்
- செயல்படுத்தப்பட வேண்டிய செயல்பாடு
- பயன்முறை
1: ஜிபிஐஓ பின் என்பது உள்ளே அழைக்கப்படும் முதல் வாதம் இணைப்பு இடையூறு() செயல்பாடு. எடுத்துக்காட்டாக, டிஜிட்டல் பின் 12 ஐ குறுக்கீடு மூலமாகப் பயன்படுத்த, அதைப் பயன்படுத்தி அழைக்கலாம் டிஜிட்டல்PinToInterrupt(12) செயல்பாடு.
2: செயல்பாடு செயல்படுத்தப்படுவது என்பது ஒவ்வொரு முறையும் குறுக்கீடு அடைந்தவுடன் அல்லது வெளிப்புற அல்லது உள் மூலத்தால் தூண்டப்பட்டவுடன் செயல்படுத்தப்படும் நிரலாகும். இது எல்இடியை சிமிட்டுவது அல்லது தீ அலாரத்தை மாற்றுவது.
3: பயன்முறை குறுக்கீடு செயல்பாட்டிற்கு தேவைப்படும் மூன்றாவது மற்றும் கடைசி வாதம். குறுக்கீட்டை எப்போது தூண்ட வேண்டும் என்பதை இது விவரிக்கிறது. பின்வரும் முறைகள் பயன்படுத்தப்படலாம்:
-
- குறைந்த: வரையறுக்கப்பட்ட GPIO பின் குறைவாக இருக்கும் ஒவ்வொரு முறையும் குறுக்கீட்டைத் தூண்டவும்.
- உயர்: வரையறுக்கப்பட்ட GPIO முள் அதிகமாக இருக்கும் ஒவ்வொரு முறையும் குறுக்கீட்டைத் தூண்டவும்.
- மாற்றம்: ஒவ்வொரு முறையும் GPIO பின் அதன் மதிப்பை உயர்விலிருந்து தாழ்வாக அல்லது நேர்மாறாக மாற்றும் போது, குறுக்கீடு தூண்டுதல்.
- வீழ்ச்சி: ஒரு குறிப்பிட்ட முள் உயர் நிலையில் இருந்து கீழே விழத் தொடங்கும் போது குறுக்கீட்டைத் தூண்டும் பயன்முறை இது.
- உயரும்: ஒரு குறிப்பிட்ட முள் குறைந்த நிலையில் இருந்து உயரத் தொடங்கும் போது குறுக்கீட்டைத் தூண்டும் பயன்முறை இது.
இன்று நாம் பயன்படுத்துவோம் உயரும் PIR சென்சார் குறுக்கீடு எல்.ஈ.டியைக் கண்டறியும் போதெல்லாம் அல்லது சென்சார் ஒளிரும், ஏனெனில் அது குறைந்த நிலையிலிருந்து உயர் நிலைக்குச் செல்லும்.
2: ESP32 நிரலாக்கத்தில் டைமர்கள்
மைக்ரோகண்ட்ரோலர் புரோகிராமிங்கில் உள்ள டைமர்கள் ஒரு குறிப்பிட்ட டைமர் காலத்திற்கு அல்லது குறிப்பிட்ட நேரத்திற்கான வழிமுறைகளை செயல்படுத்துவதில் குறிப்பிடத்தக்க பங்கு வகிக்கிறது.
வெளியீட்டைத் தூண்டுவதற்கு பொதுவாகப் பயன்படுத்தப்படும் இரண்டு முக்கிய செயல்பாடுகள் தாமதம்() மற்றும் மில்லிஸ்() . இரண்டுக்கும் இடையே உள்ள தாமதம்() செயல்பாட்டின் வித்தியாசம், அது இயக்கத் தொடங்கியவுடன் மீதமுள்ள நிரலை நிறுத்துகிறது அதே நேரத்தில் மில்லிஸ்() வரையறுக்கப்பட்ட காலத்திற்கு இயங்குகிறது, பின்னர் நிரல் முக்கிய செயல்பாடுகளுக்குச் செல்லும்.
இங்கே நாம் PIR சென்சார் கொண்ட எல்இடியைப் பயன்படுத்துவோம், குறுக்கீடு தூண்டுதலுக்குப் பிறகு அதை தொடர்ந்து ஒளிர விரும்பவில்லை. நாங்கள் மில்லிஸ்() செயல்பாட்டைப் பயன்படுத்துவோம், இது சில வரையறுக்கப்பட்ட நேரத்திற்கு அதை ஒளிர அனுமதிக்கிறது, பின்னர் அந்த நேர முத்திரை கடந்துவிட்டால் மீண்டும் அசல் நிரலுக்குச் செல்கிறது.
2.1: தாமதம்() செயல்பாடு
தாமதம் () செயல்பாடு மிகவும் எளிமையானது, இது ஒரு வாதத்தை மட்டுமே எடுக்கும் செல்வி கையொப்பமிடப்படாத நீண்ட தரவு வகை. இந்த வாதம் அடுத்த வரிக்கு நகரும் வரை நிரலை இடைநிறுத்த விரும்பும் மில்லி விநாடிகளில் நேரத்தைக் குறிக்கிறது.
எடுத்துக்காட்டாக, பின்வரும் செயல்பாடு நிரலை நிறுத்தும் 1 நொடி .
தாமதம் ( 1000 )
தாமதம்() என்பது மைக்ரோகண்ட்ரோலர்கள் நிரலாக்கத்திற்கான ஒரு வகையான தடுப்பு செயல்பாடு ஆகும். தாமதம்() இந்த குறிப்பிட்ட செயல்பாட்டு நேரங்கள் முடிவடையும் வரை மீதமுள்ள குறியீட்டை இயக்குவதைத் தடுக்கிறது. நாம் பல வழிமுறைகளை இயக்க விரும்பினால், தாமத செயல்பாடுகளைப் பயன்படுத்துவதைத் தவிர்க்க வேண்டும், அதற்குப் பதிலாக மில்லிஸ் அல்லது வெளிப்புற டைமர் RTC தொகுதிகளைப் பயன்படுத்தலாம்.
2.2: மில்லி() செயல்பாடு
millis() செயல்பாடு ESP32 போர்டு தற்போதைய நிரலை இயக்கத் தொடங்கியதிலிருந்து கடந்துவிட்ட மில்லி விநாடிகளின் எண்ணிக்கையை வழங்குகிறது. குறியீட்டின் சில வரிகளை எழுதுவதன் மூலம், ESP32 குறியீட்டை இயக்கும்போது எந்த நேரத்திலும் தற்போதைய நேரத்தை எளிதாகக் கணக்கிடலாம்.
மில்லிஸ் பரவலாகப் பயன்படுத்தப்படுகிறது, அங்கு மீதமுள்ள குறியீட்டைத் தடுக்காமல் பல பணிகளை இயக்க வேண்டும். எவ்வளவு நேரம் கடந்தது என்பதைக் கணக்கிடுவதற்குப் பயன்படுத்தப்படும் மில்லிஸ் செயல்பாட்டின் தொடரியல் இங்கே உள்ளது, எனவே நாம் ஒரு குறிப்பிட்ட வழிமுறையை இயக்கலாம்.
என்றால் ( தற்போதைய மில்லிஸ் - முந்தைய மில்லிஸ் > = இடைவெளி ) {முந்தைய மில்லிஸ் = தற்போதைய மில்லிஸ்;
}
இந்த குறியீடு முந்தைய மில்லிஸ்() ஐ தற்போதைய மில்லிஸ்() இலிருந்து கழிக்கும் நேரம் கழிக்கப்பட்டால், குறிப்பிட்ட அறிவுறுத்தல் செயல்படுத்தப்படும் இடைவெளியை வரையறுக்கும். எல்இடியை 10 வினாடிகளுக்கு ஒளிரச் செய்ய வேண்டும் என்று வைத்துக்கொள்வோம். ஒவ்வொரு 5 நிமிடங்களுக்கும் பிறகு நாம் நேர இடைவெளியை 5 நிமிடங்களுக்கு (300000ms) அமைக்கலாம். குறியீடு இயங்கும் ஒவ்வொரு முறையும் குறியீடு இடைவெளியைச் சரிபார்க்கும், அது அடைந்தவுடன் 10 வினாடிகளுக்கு LED ஐ ஒளிரச் செய்யும்.
குறிப்பு: PIR சென்சாருடன் ESP32 ஐ இடைமுகப்படுத்துவதற்கு இங்கே நாம் மில்லிஸ்() செயல்பாட்டைப் பயன்படுத்துவோம். மில்லியைப் பயன்படுத்துவதற்கும் தாமதப்படுத்தாமல் இருப்பதற்கும் முக்கியக் காரணம், தாமதம்() செயல்பாடு செய்ததைப் போல மில்லிஸ்() செயல்பாடு குறியீட்டைத் தடுக்காது. எனவே பிஐஆர் இயக்கத்தைக் கண்டறிந்ததும் ஒரு குறுக்கீடு உருவாக்கப்படும். குறுக்கீடு மில்லிஸ்() செயல்பாட்டைப் பயன்படுத்துவது, வரையறுக்கப்பட்ட நேரத்திற்கு எல்இடியைத் தூண்டும், அதன் பிறகு இயக்கம் நிறுத்தப்பட்டால் millis() செயல்பாடு மீட்டமைக்கப்பட்டு அடுத்த குறுக்கீட்டிற்காக காத்திருக்கும்.
நாம் தாமதம்() செயல்பாட்டைப் பயன்படுத்தினால், அது குறியீட்டை முற்றிலுமாகத் தடுக்கும், மேலும் எந்த குறுக்கீடும் ESP32 ஆல் படிக்கப்படாது, இதன் விளைவாக திட்டம் தோல்வியடையும்.
3: ESP32 உடன் PIR சென்சார் இடைமுகம்
இங்கே நாம் ஆர்டுயினோ ஐடிஇ குறியீட்டில் மில்லிஸ்() செயல்பாட்டைப் பயன்படுத்துவோம், ஏனெனில் ஒவ்வொரு முறையும் பிஐஆர் சென்சார் சில இயக்கங்களைக் கண்டறியும்போது எல்இடியைத் தூண்ட விரும்புகிறோம். இந்த எல்இடி ஒரு குறிப்பிட்ட நேரத்திற்கு ஒளிரும், அதன் பிறகு அது இயல்பு நிலைக்குத் திரும்பும்.
நமக்குத் தேவைப்படும் கூறுகளின் பட்டியல் இங்கே:
-
- ESP32 மேம்பாட்டு வாரியம்
- PIR மோஷன் சென்சார் (HC-SR501)
- LED
- 330 ஓம் மின்தடை
- கம்பிகளை இணைக்கிறது
- ப்ரெட்போர்டு
திட்டவட்டமான ESP32 உடன் PIR சென்சார்:
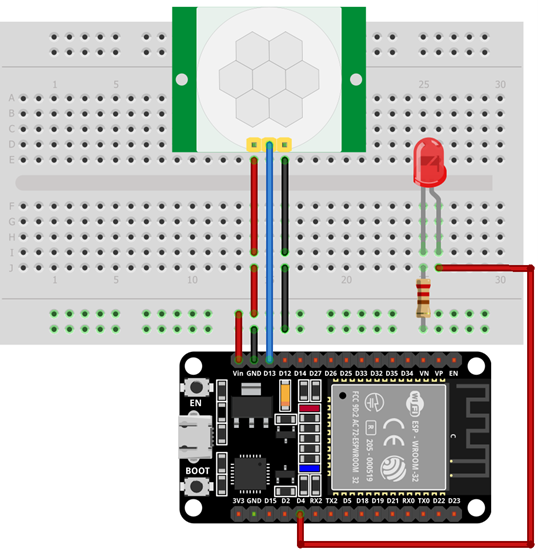
PIR சென்சாருடன் ESP32 இன் பின் இணைப்புகள்:
| ESP32 | PIR சென்சார் |
| வாருங்கள் | விசிசி |
| GPIO13 | வெளியே |
| GND | GND |
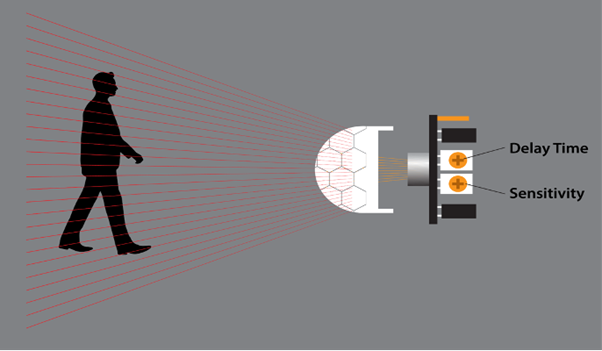
3.1: PIR மோஷன் சென்சார் (HC-SR501)
PIR என்பதன் சுருக்கம் செயலற்ற அகச்சிவப்பு சென்சார் . இது ஒரு ஜோடி பைரோ எலக்ட்ரிக் சென்சார்களைப் பயன்படுத்துகிறது, இது அதன் சுற்றுப்புறத்தைச் சுற்றியுள்ள வெப்பத்தைக் கண்டறியும். இந்த இரண்டு பைரோஎலக்ட்ரிக் சென்சார்களும் ஒன்றன் பின் ஒன்றாக கிடக்கின்றன, மேலும் ஒரு பொருள் அவற்றின் வரம்பிற்குள் வரும்போது வெப்ப ஆற்றலில் மாற்றம் அல்லது இந்த இரண்டு சென்சார்களுக்கும் இடையிலான சமிக்ஞை வேறுபாடு PIR சென்சார் வெளியீடு குறைவாக இருக்கும். PIR அவுட் பின் குறைந்தவுடன், இயக்க ஒரு குறிப்பிட்ட வழிமுறையை அமைக்கலாம்.
பிஐஆர் சென்சாரின் பண்புகள் பின்வருமாறு:
-
- செயல்திட்டத்தின் இருப்பிடத்தைப் பொறுத்து உணர்திறனை அமைக்கலாம் (எலி அல்லது இலை அசைவை உணர்தல் போன்றவை).
- PIR சென்சார் ஒரு பொருளை எவ்வளவு நேரம் கண்டறிகிறது என்பதை அமைக்கலாம்.
- வீட்டு பாதுகாப்பு அலாரங்கள் மற்றும் பிற வெப்ப அடிப்படையிலான இயக்கம் கண்டறிதல் பயன்பாடுகளில் பரவலாகப் பயன்படுத்தப்படுகிறது.
3.2: பின்அவுட் HC-SR501
PIR HC-SR501 மூன்று ஊசிகளுடன் வருகிறது. அவற்றில் இரண்டு விசிசி மற்றும் ஜிஎன்டிக்கான பவர் பின்கள் மற்றும் ஒன்று தூண்டுதல் சிக்னலுக்கான அவுட்புட் பின்.
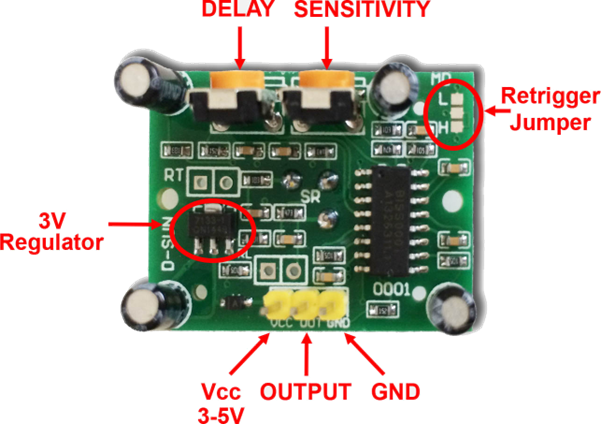
பிஐஆர் சென்சார் பின்களின் விளக்கம் பின்வருமாறு:
| பின் | பெயர் | விளக்கம் |
| 1 | விசிசி | சென்சாருக்கான உள்ளீடு பின் ESP32 Vin Pin உடன் இணைக்கவும் |
| இரண்டு | வெளியே | சென்சார் வெளியீடு |
| 3 | GND | சென்சார் ஜிஎன்டி |
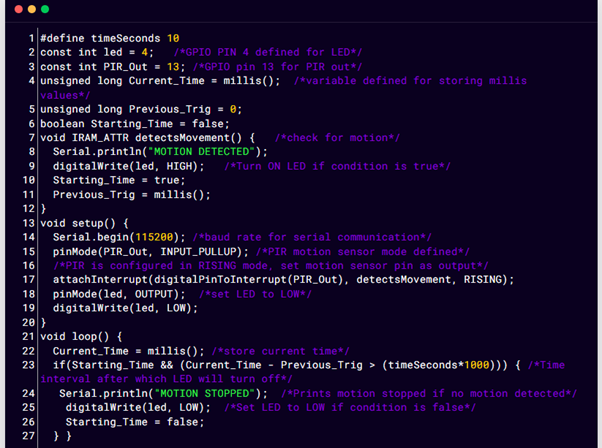
3.3: குறியீடு
இப்போது ESP32 நிரல் செய்ய கொடுக்கப்பட்ட குறியீட்டை Arduino IDE எடிட்டரில் எழுதி ESP32 க்கு பதிவேற்றவும்.
#நேரத்தை வரையறுக்கவும் வினாடிகள் 10const int led = 4 ; /* GPIO பின் 4 வரையறுக்கப்பட்டது க்கான LED */
const int PIR_Out = 13 ; /* GPIO முள் 13 க்கான PIR அவுட் */
கையொப்பமிடப்படாத நீண்ட தற்போதைய_நேரம் = மில்லி ( ) ; /* மாறி வரையறுக்கப்பட்டுள்ளது க்கான மில்லிஸ் மதிப்புகளை சேமிக்கிறது */
கையொப்பமிடாத நீண்ட Previous_Trig = 0 ;
பூலியன் தொடக்க_நேரம் = பொய் ;
வெற்றிடமான IRAM_ATTR இயக்கத்தைக் கண்டறிகிறது ( ) { /* காசோலை க்கான இயக்கம் */
Serial.println ( 'இயக்கம் கண்டறியப்பட்டது' ) ;
டிஜிட்டல் ரைட் ( தலைமையில், உயர் ) ; /* LED ஐ இயக்கவும் என்றால் நிபந்தனை உள்ளது உண்மை */
தொடக்க_நேரம் = உண்மை ;
Previous_Trig = மில்லிஸ் ( ) ;
}
வெற்றிட அமைப்பு ( ) {
தொடர்.தொடங்கு ( 115200 ) ; /* பாட் விகிதம் க்கான தொடர் தொடர்பு */
பின் பயன்முறை ( PIR_Out, INPUT_PULLUP ) ; /* PIR மோஷன் சென்சார் பயன்முறை வரையறுக்கப்பட்டுள்ளது */
/* PIR கட்டமைக்கப்பட்டுள்ளது உள்ளே ரைசிங் பயன்முறை, அமைக்கப்பட்டது மோஷன் சென்சார் முள் என வெளியீடு */
இணைப்பு குறுக்கீடு ( டிஜிட்டல்PinToInterrupt ( PIR_அவுட் ) , இயக்கத்தைக் கண்டறிகிறது, எழுகிறது ) ;
பின் பயன்முறை ( தலைமையில், அவுட்புட் ) ; /* அமைக்கப்பட்டது LED முதல் குறைந்த வரை */
டிஜிட்டல் ரைட் ( தலைமையில், குறைந்த ) ;
}
வெற்றிட வளையம் ( ) {
தற்போதைய_நேரம் = மில்லி ( ) ; /* தற்போதைய சேமிப்பு நேரம் */
என்றால் ( தொடக்க_நேரம் && ( தற்போதைய_நேரம் - முந்தைய_முயற்சி > ( நேர விநாடிகள் * 1000 ) ) ) { /* பிறகு நேர இடைவெளி எந்த LED அணைக்கப்படும் */
Serial.println ( 'இயக்கம் நிறுத்தப்பட்டது' ) ; /* அச்சு இயக்கம் நிறுத்தப்பட்டது என்றால் எந்த இயக்கமும் கண்டறியப்படவில்லை */
டிஜிட்டல் ரைட் ( தலைமையில், குறைந்த ) ; /* LED ஐ குறைவாக அமைக்கவும் என்றால் நிபந்தனை உள்ளது பொய் */
தொடக்க_நேரம் = பொய் ;
}
}
LED மற்றும் PIR வெளியீட்டிற்கான GPIO பின்களை வரையறுப்பதன் மூலம் குறியீடு தொடங்கப்பட்டது. அடுத்து, இயக்கம் கண்டறியப்படும்போது எல்இடியை இயக்க உதவும் மூன்று வெவ்வேறு மாறிகளை உருவாக்கினோம்.
இந்த மூன்று மாறிகள் தற்போதைய_நேரம், முந்தைய_முயற்சி, மற்றும் தொடக்க_நேரம். இந்த மாறிகள் தற்போதைய நேரம், இயக்கம் கண்டறியப்பட்ட நேரம் மற்றும் இயக்கம் கண்டறியப்பட்ட பிறகு டைமர் ஆகியவற்றைச் சேமிக்கும்.
அமைவுப் பகுதியில் முதலில், தகவல்தொடர்புக்கான தொடர் பாட் வீதத்தை வரையறுத்தோம். அடுத்து பயன்படுத்துவது பின்முறை() PIR மோஷன் சென்சாரை INPUT PULLUP ஆக அமைக்கவும். PIR குறுக்கீட்டை அமைக்க இணைப்பு இடையூறு() விவரிக்கப்பட்டுள்ளது. GPIO 13 ரைசிங் பயன்முறையில் இயக்கத்தைக் கண்டறிய விவரிக்கப்பட்டுள்ளது.
குறியீட்டின் லூப்() பகுதியில் அடுத்ததாக, மில்லிஸ்() செயல்பாட்டைப் பயன்படுத்தி, தூண்டுதல் அடையப்படும்போது எல்இடியை இயக்கி அணைக்கிறோம்.
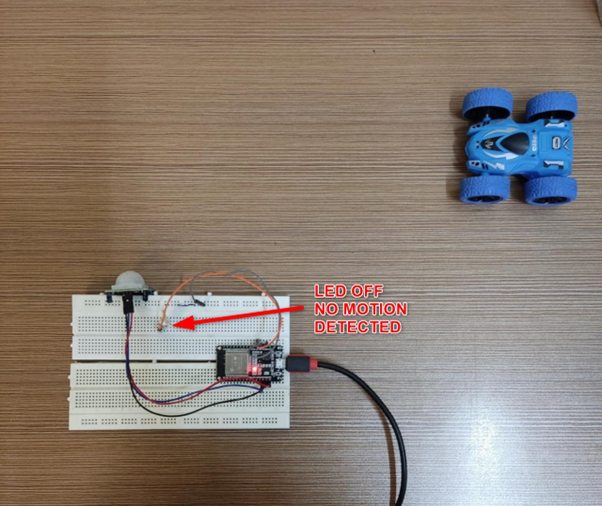
3.4: வெளியீடு
வெளியீட்டுப் பிரிவில், பொருள் PIR சென்சாரின் வரம்பிற்கு வெளியே இருப்பதைக் காணலாம் LED திரும்பியது ஆஃப் .
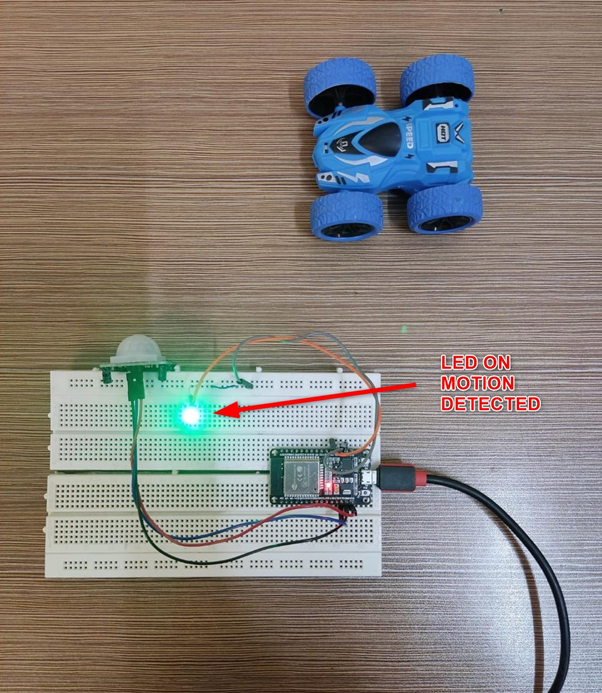
இப்போது PIR சென்சார் LED மூலம் கண்டறியப்பட்ட இயக்கம் மாறும் ஆன் க்கான 10 நொடி அதன் பிறகு எந்த இயக்கமும் கண்டறியப்படவில்லை என்றால் அது அப்படியே இருக்கும் ஆஃப் அடுத்த தூண்டுதல் கிடைக்கும் வரை.
Arduino IDE இல் உள்ள தொடர் மானிட்டரால் பின்வரும் வெளியீடு காட்டப்படுகிறது.
முடிவுரை
ESP32 உடன் ஒரு PIR சென்சார் அதன் வரம்பைக் கடந்து செல்லும் பொருட்களின் இயக்கத்தைக் கண்டறிய உதவும். ESP32 நிரலாக்கத்தில் குறுக்கீடு செயல்பாட்டைப் பயன்படுத்தி சில குறிப்பிட்ட GPIO பின்னில் பதிலைத் தூண்டலாம். மாற்றம் கண்டறியப்பட்டால், குறுக்கீடு செயல்பாடு தூண்டப்படும் மற்றும் LED இயக்கப்படும்.